Schnellstart: Haptic Advanced Robotics Plattform (H.A.R.P)
In diesem Artikel finden Sie Anleitungen zu den grundlegenden Vorgängen und zum Anschluss der verschiedenen Geräte, die mit H.A.R.P. verwendet werden können. Am Ende werden Sie die grundlegende Funktionsweise von H.A.R.P. und die Reihenfolge der Vorgänge zur korrekten Verwendung des Softwarepakets kennen.
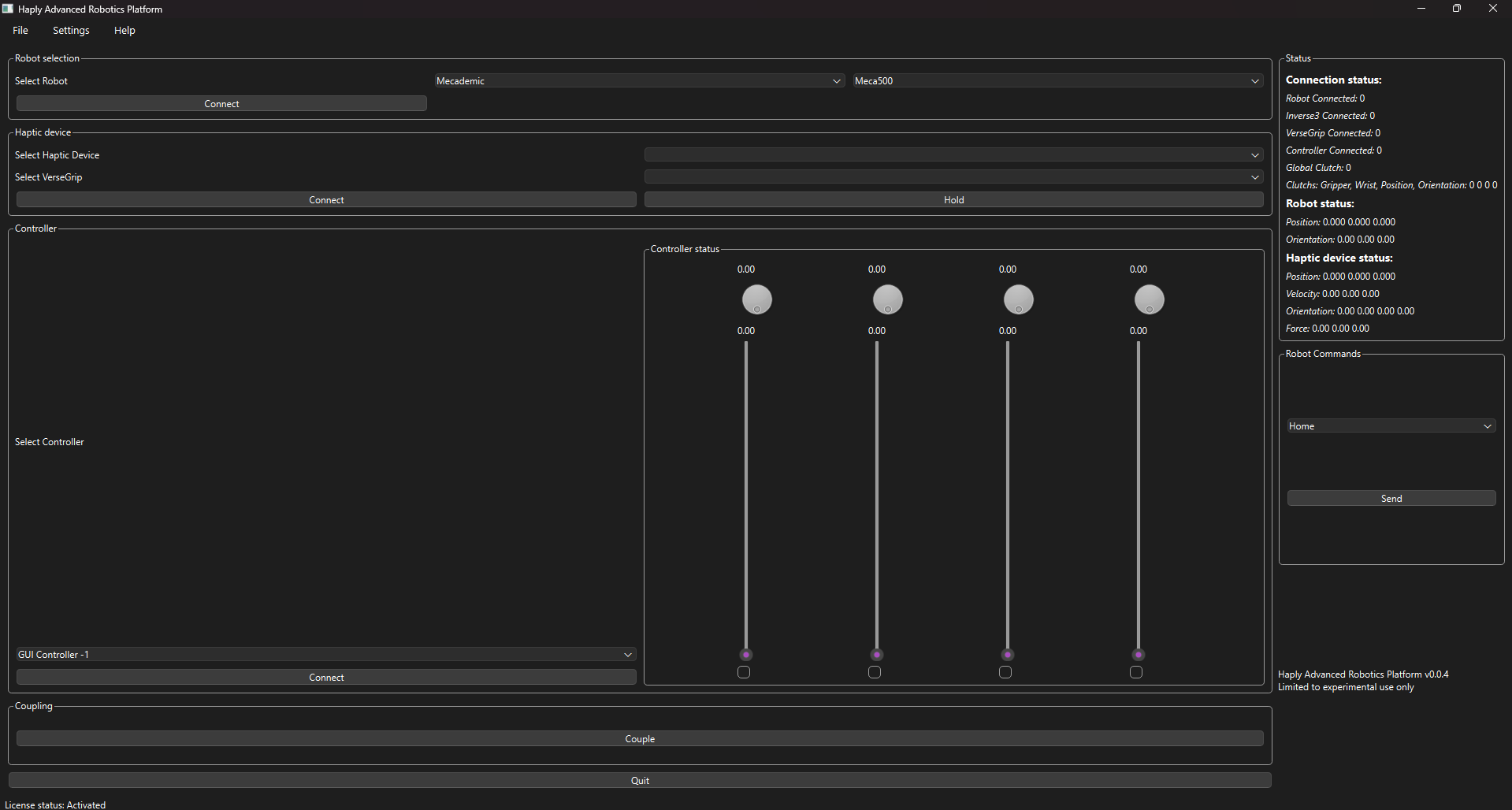
Übersicht
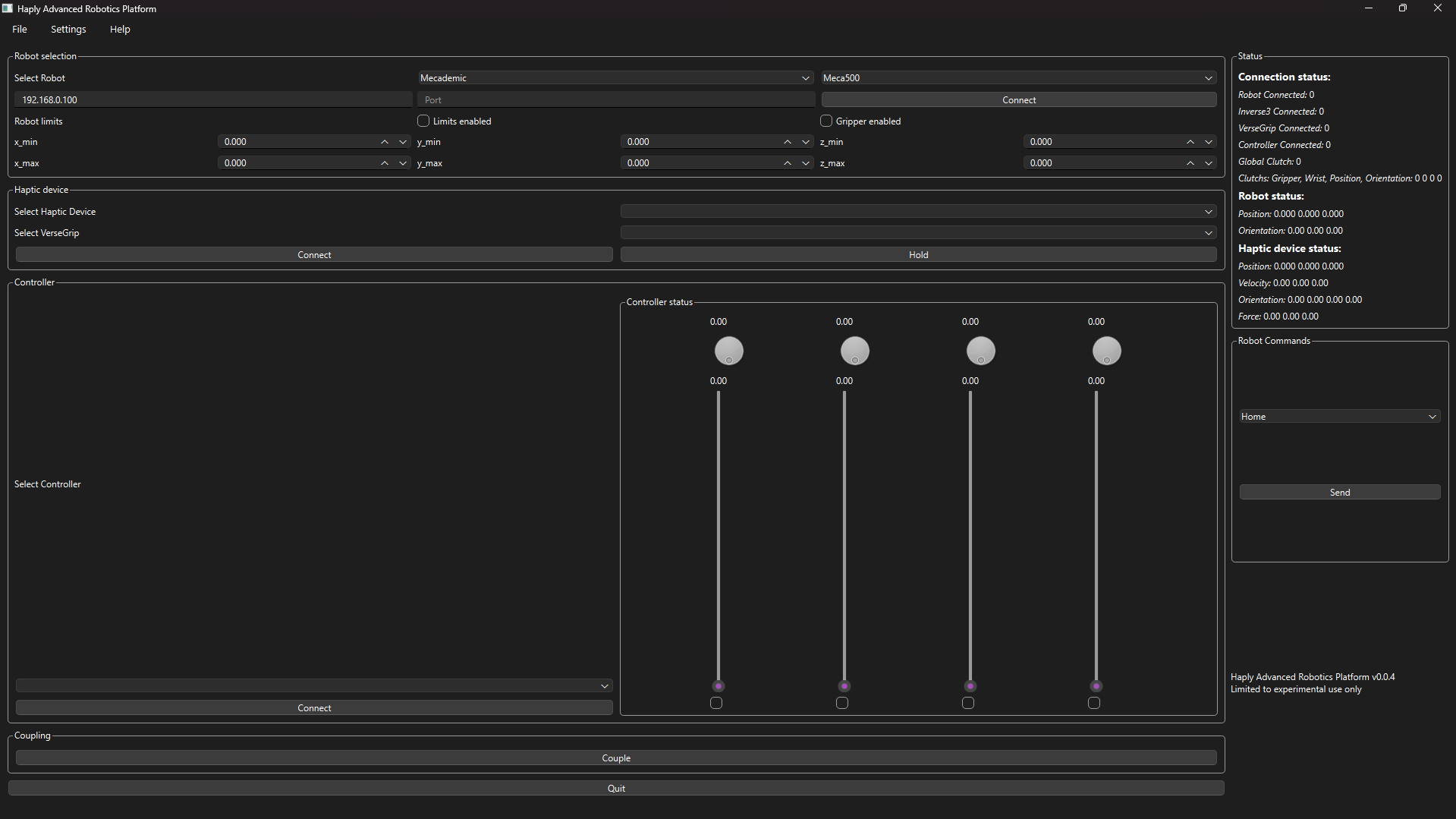
Das H.A.R.P.-Programm besteht aus 10 Abschnitten.
- Das Menü Datei
- Das Menü Einstellungen
- Das Menü Hilfe
- Die Beenden-Taste
- Das Auswahlfeld Roboter
- Das haptische Gerät Box
- Das Feld Controller
- Die Kupplungsbox
- Das Feld Status
- Das Feld Roboterbefehle
Das Menü "Hilfe" und die Schaltfläche "Beenden" sind selbsterklärend und werden daher nicht näher erläutert.
Vergewissern Sie sich, dass die gesamte Hardware mit Strom versorgt und an den Steuercomputer angeschlossen ist, bevor Sie das H.A.R.P.-Programm starten.
Hardware-Einrichtung
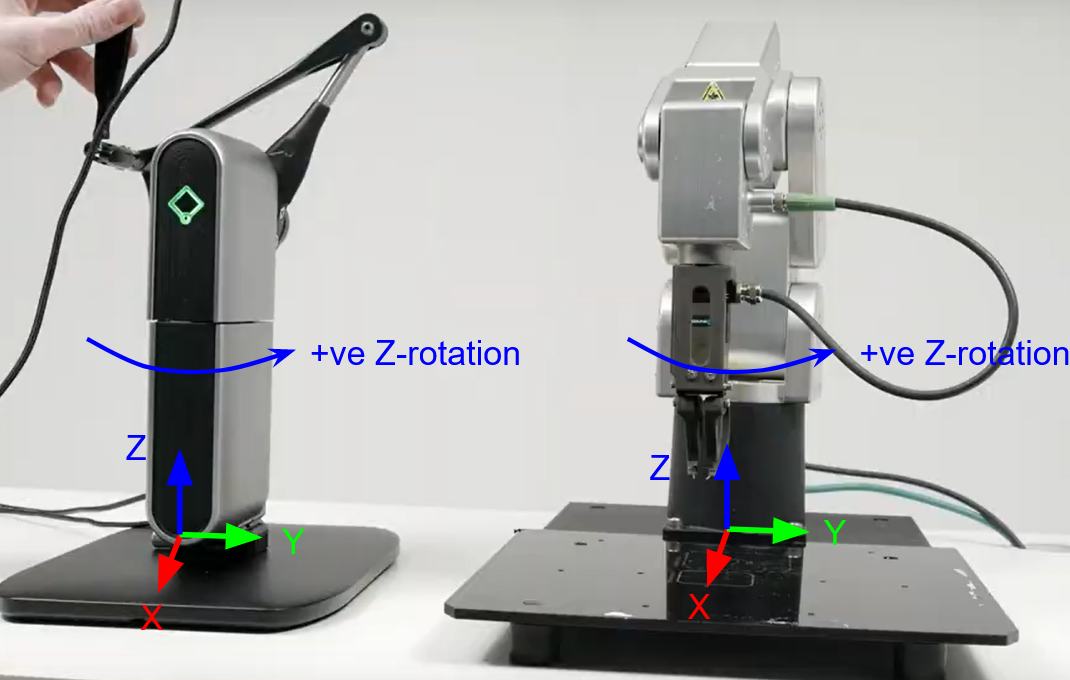
Standardmäßig ist H.A.R.P. so eingestellt, dass die Umkehrung und der Roboter in den folgenden Ausrichtungen verwendet werden; beachten Sie, dass eine rechtshändige Umkehrung gezeigt wird, auch die relativen Positionen spielen keine Rolle.
Aktivieren Ihrer Lizenz
Der erste Schritt beim ersten Öffnen von H.A.R.P. ist die Eingabe des mitgelieferten Lizenzschlüssels. Ohne Lizenz funktioniert nur die Seite Inverse 3 , alles andere funktioniert nicht.

Wählen Sie Lizenz aus dem Menü Datei

Geben Sie den mitgelieferten Lizenzschlüssel ein und drücken Sie auf Aktivieren.
Dieser Vorgang muss nur einmal pro Benutzerkonto/Computer durchgeführt werden
Anschließen eines Roboters
Der erste Schritt bei der Verwendung von H.A.R.P. ist der Anschluss des Roboters, den Sie steuern möchten. Derzeit wird nur der Mecademic Meca500 offiziell unterstützt.

Auswahl des Roboters und Eingabe der Verbindungsinformationen
Wählen Sie zunächst die Firma des Roboters aus, den Sie steuern möchten, und dann das gewünschte Robotermodell.
Als Nächstes geben Sie die IP-Adresse und den Port ein, die für die Verbindung mit dem Roboter verwendet werden. Weitere Informationen zur korrekten Vorgehensweise finden Sie im Handbuch des Herstellers.
Grenzwerte setzen
Wenn Sie Software-Grenzwerte für den von Ihnen betriebenen Roboter wünschen, aktivieren Sie das Kontrollkästchen Grenzwerte aktiviert und geben Sie die gewünschten Grenzwerte in die entsprechenden Felder ein
Betrieb des Greifers
Wenn Sie einen Greifer angeschlossen haben, stellen Sie sicher, dass Sie das Kästchen "Greifer aktiviert" ankreuzen. Wenn Sie einen Greifer angeschlossen haben, aber das Kästchen nicht ankreuzen, wird das Programm nicht funktionieren.
Nachdem Sie die oben genannten Schritte durchgeführt haben, klicken Sie auf die Schaltfläche "Verbinden", um den Roboter mit H.A.R.P. zu verbinden. Der Status des Roboters sollte nun im Statusfeld angezeigt werden.
Verbinden einer Haply Inverse und VerseGrip

Wenn Sie Haply Inverse 3 und VerseGrip korrekt eingerichtet und vor dem Start von H.A.R.P. an den Steuercomputer angeschlossen haben, sollten sie in den entsprechenden Dropdown-Menüs erscheinen. Wählen Sie einfach die richtigen Geräte aus und klicken Sie auf die Schaltfläche "Verbinden"; der Gerätestatus sollte nun im Statusfeld angezeigt werden.
Die Halten-Taste
Mit der Taste "Halten" können Sie Inverse 3 anweisen, mit Hilfe der Kraftkontrollfunktion an Ort und Stelle zu bleiben. Diese Funktion kann jederzeit aktiviert werden, obwohl wir nicht empfehlen, sie länger als ein paar Minuten zu verwenden, wie in unserem Abschnitt zum sicheren Betrieb erläutert wird.
Anschließen eines zusätzlichen Controllers
Um H.A.R.P. zusätzliche Funktionalität zu verleihen, kann ein zusätzlicher Controller angeschlossen werden, entweder ein Hardware-Controller wie der Midi Sidekick oder einfach der eingebaute GUI-Controller.

Sidekick
Sofern der Sidekick vor dem Start von H.A.R.P. mit dem Steuerrechner verbunden war, sollte er im Dropdown-Menü erscheinen. Wählen Sie ihn einfach aus und drücken Sie auf Verbinden. Stellen Sie sicher, dass Sie alle Knöpfe und Schieberegler bewegen, um ihre Werte von 0 zu ändern.
Beachten Sie, dass Sie die Eingänge nicht über die GUI steuern können, wenn Sie den Sidekick-Controller ausgewählt/angeschlossen haben
Gui Controller
Wenn Sie nur den eingebauten Gui-Controller verwenden möchten, wählen Sie ihn einfach aus der Dropdown-Liste aus und drücken Sie auf "Verbinden". Danach sollten Sie in der Lage sein, die verschiedenen Gui-Elemente zu ziehen/anzuklicken, um die Werte zu ändern.
Alles koppeln
Sobald Sie den Roboter, Inverse 3 und die Zusatzsteuerung (optional einen VerseGrip) angeschlossen haben, können Sie die Kopplungstaste drücken, um alle Komponenten zu verbinden. Der Inverse übernimmt sofort die Kontrolle über den Roboter, halten Sie also den Griff des Inversen fest, bevor Sie diese Taste drücken.
Achten Sie darauf, dass Sie alles entkoppeln, bevor Sie das Menü Roboterbefehle verwenden, da sich sonst auch die Umkehrung bewegt.
Menü "Status
Im Menü Status werden die meisten Geräteinformationen sowie die Kupplungszustände angezeigt.
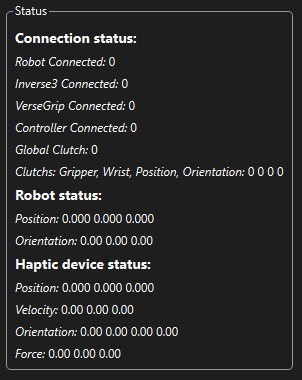
Oben wird der Verbindungsstatus aller vier möglichen Hardware-Geräte angezeigt. Dies informiert Sie darüber, ob Sie alles richtig angeschlossen haben: 1 ist verbunden und 0 ist nicht verbunden.
Darunter wird der globale Kupplungsstatus angezeigt. 0 bedeutet, dass Sie die Kontrolle über den Roboter haben, und 1 bedeutet, dass die Kontrolle für diesen Teil des Kontrollstapels pausiert ist.
Anschließend werden die Position des Roboters und die Ausrichtung des Endeffektors (unter Verwendung von Euler-Winkeln) angezeigt.
Schließlich werden die inverse Position und Geschwindigkeit sowie die Ausrichtung des Versegrips (in wxyz-Quaternionen) angezeigt, woraufhin die aktuelle Renderkraft, die an den Inversen gesendet wird, angezeigt wird.
Roboter-Befehle

Der letzte Steuerungsabschnitt sind die Roboterbefehle. Hier hat der Benutzer die Möglichkeit, vordefinierte Befehle an den angeschlossenen Roboter zu senden, derzeit sind nur die Befehle "Home" und "Ship" verfügbar. Damit kann der Benutzer den Roboter in die Ausgangsposition zurückbringen, wenn er sich in einer ungünstigen Position befindet, und in die Schiffsposition für die Lagerung und den Versand des Roboters.
Aufnahme
Das Aufnahmemenü ermöglicht es dem Benutzer, die vom Inversen gesendeten Roboterbefehle aufzuzeichnen und sie am Ende sowohl vorwärts als auch rückwärts abzuspielen.
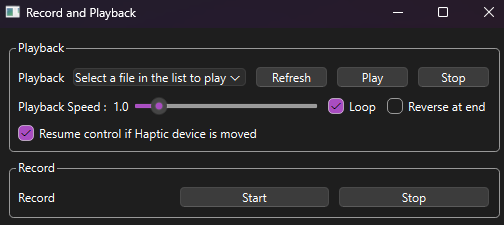
Wenn Sie versuchen, Roboterbefehle aufzunehmen, verwenden Sie das untere Aufnahmemenü, drücken Sie auf Start, um die Aufnahme zu starten, und stoppen Sie, sobald Sie die gewünschten Aktionen abgeschlossen haben. Achten Sie darauf, den Roboter zu kuppeln, wenn Sie die Aufnahme beendet haben.
Sobald die Aufnahme beendet ist, wählen Sie aus, ob Sie die Wiedergabe in einer Schleife wiedergeben und/oder die cmds am Ende umkehren möchten. Sie können dann die Schaltfläche Aktualisieren drücken, damit das Programm nach verfügbaren Aufnahmen sucht, die gewünschte Aufnahme auswählen und die Wiedergabetaste drücken; wenn Sie Schleife gewählt haben, drücken Sie die Stopptaste, wenn die Wiedergabe beendet werden soll. Der Benutzer kann auch die Wiederaufnahme der Steuerung bei Bewegung des haptischen Geräts auswählen, wodurch die Wiedergabe gestoppt und die haptische Steuerung wieder aufgenommen wird, wenn das Gerät umgekehrt bewegt wird. Andernfalls müssen Sie, nachdem Sie die Stopptaste gedrückt haben, den Roboter auskuppeln, bevor Sie die Kontrolle wiedererlangen.
Außerdem können Sie die Abspielgeschwindigkeit mit dem mitgelieferten Schieberegler erhöhen oder verringern.
Benutzerpräferenzen
Über das Menü "Benutzereinstellungen" kann der Benutzer alle seine bevorzugten Einstellungen speichern, wodurch der Startvorgang erheblich beschleunigt wird.
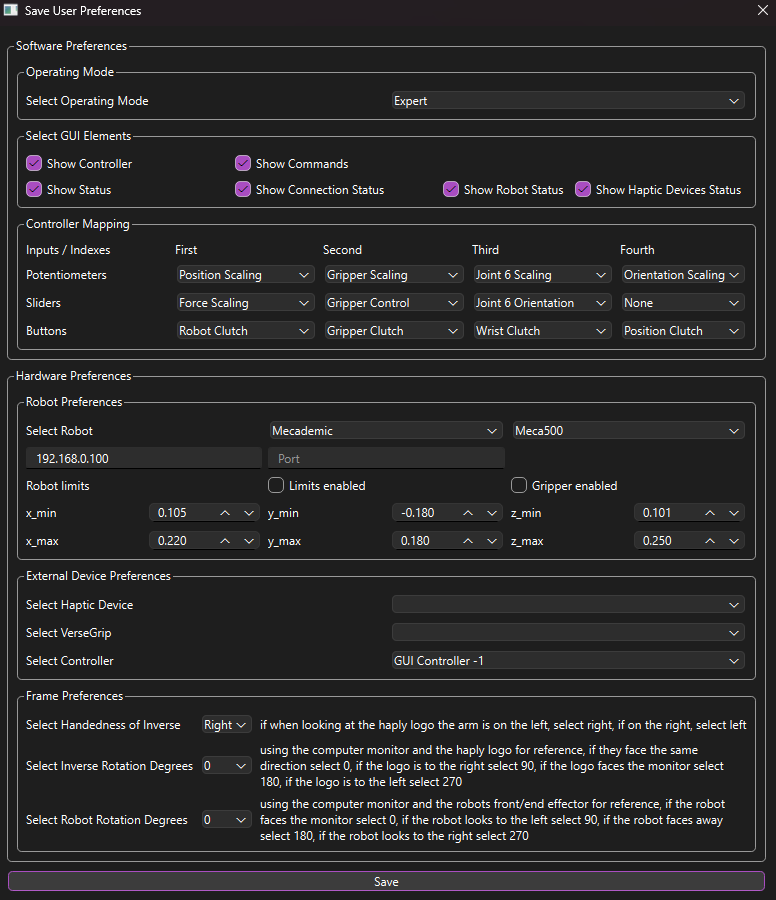
Software-Einstellungen
Die erste Option ist der Betriebsmodus, den der Benutzer für das H.A.R.P.-Hauptmenü wünscht; die Optionen sind Experte (Standard), Fortgeschrittener und Einfacher. Die Betriebsarten "Fortgeschritten" und "Einfach" werden weiter unten erläutert.
Als Nächstes kann der Benutzer entscheiden, ob er bestimmte GUI-Elemente ein- oder ausblenden möchte, indem er die verschiedenen Kästchen aktiviert oder deaktiviert
Danach kann der Benutzer anpassen, was jedes Potentiometer, jeder Schieberegler und jede Taste sowohl auf dem GUI-Controller als auch auf dem Sidekick-Controller bewirkt. Die Potentiometer- und Schieberegler-Optionen sind vollständig austauschbar, so dass der Benutzer die Skalierung und Steuerung nach seinen Wünschen anpassen kann.
Hardware-Einstellungen
Zunächst kann der Benutzer einstellen und speichern, mit welchem Roboter er sich verbinden möchte, sowie die Grenzwerte speichern, die er verwenden möchte. Dies entspricht dem Menü, das für den Roboter im Expertenmodus verfügbar ist. Die Werte werden aus diesem Menü kopiert, sodass sie nicht erneut eingegeben werden müssen.
Als Nächstes können die verschiedenen externen Geräte, die Sie verwenden möchten, gespeichert werden, einschließlich des haptischen Geräts, VerseGrip, und ob Sie den GUI-Controller oder den Midi-Sidekick-Controller verwenden möchten.
Schließlich kann der Benutzer eingeben, wie er seine physikalischen Geräte eingestellt hat, wenn diese nicht mit den von H.A.R.P. verwendeten Standardeinstellungen übereinstimmen; derzeit werden nur Ausrichtungsänderungen um die vertikale Achse unterstützt. Die wichtigste Option ist es, H.A.R.P. mitzuteilen, ob Sie eine Rechts- oder Linksdrehung verwenden, da sich dadurch das Steuerungsschema ändert. Die in H.A.R.P. verwendete Rahmenkonvention wird weiter unten erläutert.
Betriebsmodi
Zusätzlich zum Standard-Expertenmodus kann der Benutzer nach dem Ausfüllen und Speichern des Einstellungsdialogs in den erweiterten oder einfachen Modus wechseln, um einen schnelleren Start und eine weniger unübersichtliche Benutzeroberfläche zu erhalten.
Im erweiterten Modus werden einige Roboteroptionen entfernt, während der Benutzer weiterhin zwischen den Geräten wechseln und die volle Kontrolle behalten kann
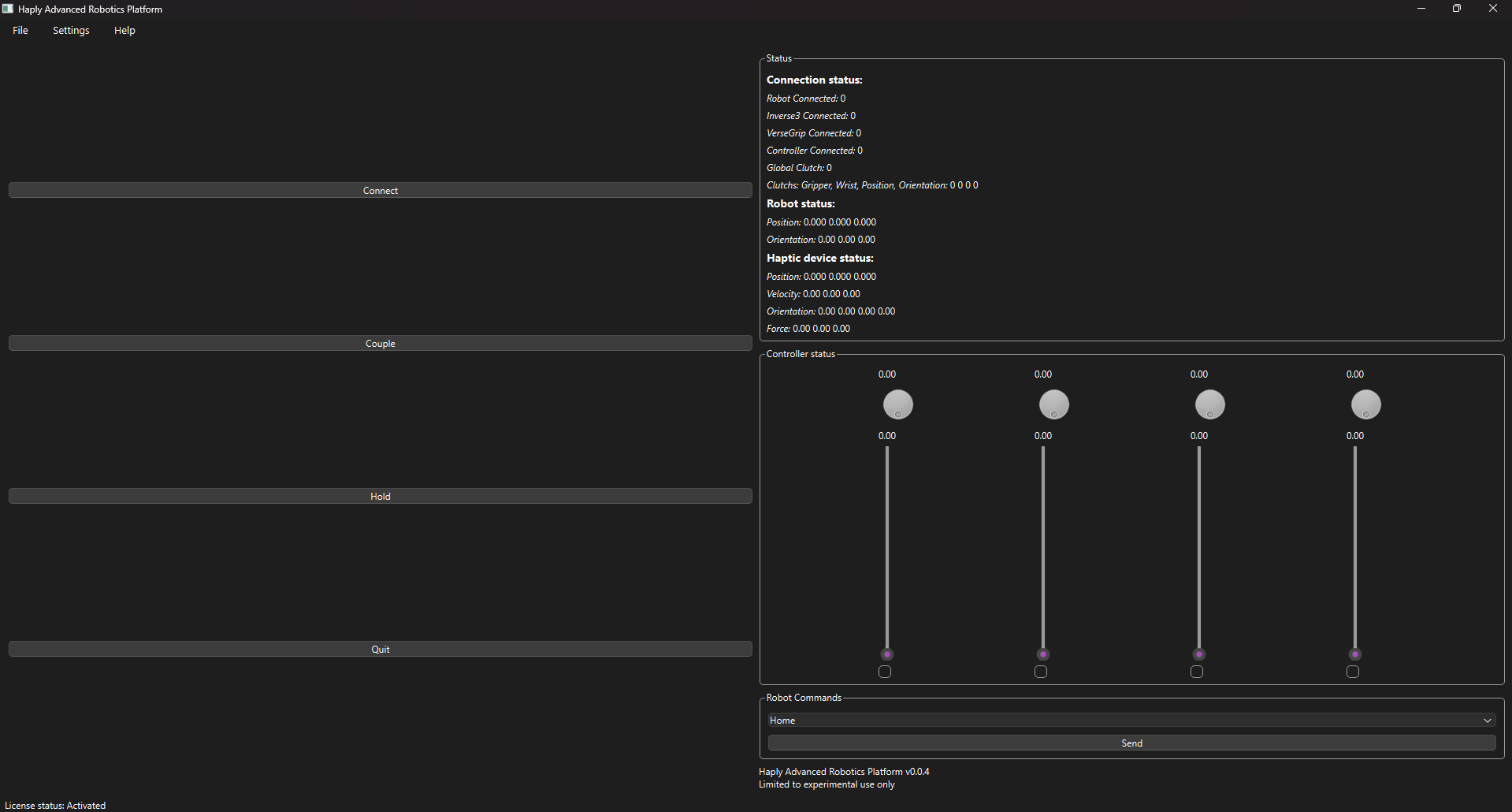
Im einfachen Modus werden die meisten Optionen entfernt, so dass nur eine Verbindungstaste, eine Haltetaste, eine Kopplungstaste und eine Beendetaste übrig bleiben. Auch das Statusmenü, der Steuergerätestatus und das Menü mit den Roboterbefehlen werden entfernt.
Rahmen-Konventionen
Die Rahmen, die verwendet werden, um die Umkehrung mit einem Roboter zu verbinden, sind oben dargestellt, wobei zu beachten ist, dass es einen Zwischenrahmen gibt, der auf der ungefähren Ausrichtung des Steuerungscomputerbildschirms basiert. Die Optionen werden in 90-Grad-Schritten geändert, außerdem wird nur die Ausrichtung der vertikalen Achse berücksichtigt. Bei der Auswahl der relativen Ausrichtung ist die Rechte-Hand-Regel anzuwenden, um die Winkeländerung zwischen dem Roboter oder der Umkehrung und dem Computerbildschirm zu ermitteln.
Wenn Sie den Versegrip zur Steuerung der Ausrichtung des Roboter-Endeffektors verwenden, kalibrieren Sie den Versegrip so, dass er dem Roboter-Endeffektor zugewandt ist, um seine Rahmenreferenz einzustellen; es muss keine Drehung im vorgesehenen Menü ausgewählt werden.