import CTA aus '/src/theme/MDXComponents/CTA' import HH aus '..haply.png'
Erste Schritte mit dem Inverse3
Dieser Artikel enthält Anweisungen zur grundlegenden Bedienung, zur Kalibrierung und zum Anschluss von Zubehör für das Inverse3. Am Ende werden Sie gut gerüstet sein, um das Gerät zu bedienen und eine vorgefertigte haptische Simulation auszuprobieren.
Was ist in der Schachtel?

Die Box enthält: einen VerseGrip (1), die Inverse3 (2), zwei USB-C-Kabel (3) und ein Netzteil (4); die VerseMount Clamp (5) wird in einer separaten Box geliefert. Die Inverse3 hat 4 Komponenten, die für diesen Artikel relevant sind: eine Statusleuchte (A), einen Gimbal (B), Arme (C) und einen Fuß (D).
Das mitgelieferte Netzteil unterstützt 100V - 240V. Das mitgelieferte Netzkabel kann durch ein beliebiges Kabel mit einem IEC C13-Stecker ersetzt werden, um den Steckdosentyp Ihres Landes zu unterstützen. Bitte tauschen Sie nicht das Netzteil selbst aus, da dies zum Erlöschen Ihrer Garantie führen kann. Kontaktieren Sie uns bei Fragen.
Inverse3 Einrichtung
In diesem Abschnitt werden die Schritte zur Montage des Inverse3 auf einem Tisch, zum Ein- und Ausklappen der Arme und zur Kalibrierung beschrieben.
Montage der Inverse3
Befestigen Sie die VerseMount-Klemme zunächst an einer flachen, ebenen und stabilen Oberfläche, die sich vorzugsweise in bequemer Reichweite Ihrer dominanten Hand befindet. Vergewissern Sie sich, dass der untere Knopf, der die Klemme hält, fest angezogen ist und dass sie sich nicht leicht bewegen lässt.

Befestigen Sie die Inverse3 an der Tischklemme, indem Sie den Fuß der Inverse3 in die Tischklemme schieben und die Montageplatte festziehen.

Vor der Inbetriebnahme sollte das Gerät vollständig senkrecht zum Boden stehen.
Inverse3 verwendet ein standardisiertes Arca-Swiss-Befestigungssystem, so dass Sie Ihre eigene Befestigung entwerfen können.
Ein- und Ausklappen der Arme
Die Arme des Inverse3 lassen sich einklappen, wenn sie nicht gebraucht werden. So sind sie vor versehentlicher Beschädigung geschützt und das Gerät lässt sich leichter einpacken und transportieren.
- Ziehen Sie die Arme mit einer Hand zu sich heran, bis sie sich geübt anfühlen, und drücken Sie dann mit der freien Hand die Arme so zusammen, dass sie sich in einer Linie befinden.
- Klappen Sie nun die Arme gegen das Gehäuse des Inverse3. Sie sollten spüren, wie die Seitenverriegelung einrastet und die Arme fixiert.
- Klappen Sie schließlich die Enden der Arme gegen das Gehäuse des Geräts. Sie sollten spüren, wie der Werkzeugaufsatz am Gehäuse einrastet.
Unverzichtbare Software
Laden Sie den Haply Hub herunter und installieren Sie ihn auf Ihrem Computer. Diese App dient als Treiber für Ihr neues Inverse3 sowie als wichtiges Werkzeug für die Visualisierung und die Erkundung von Funktionen.
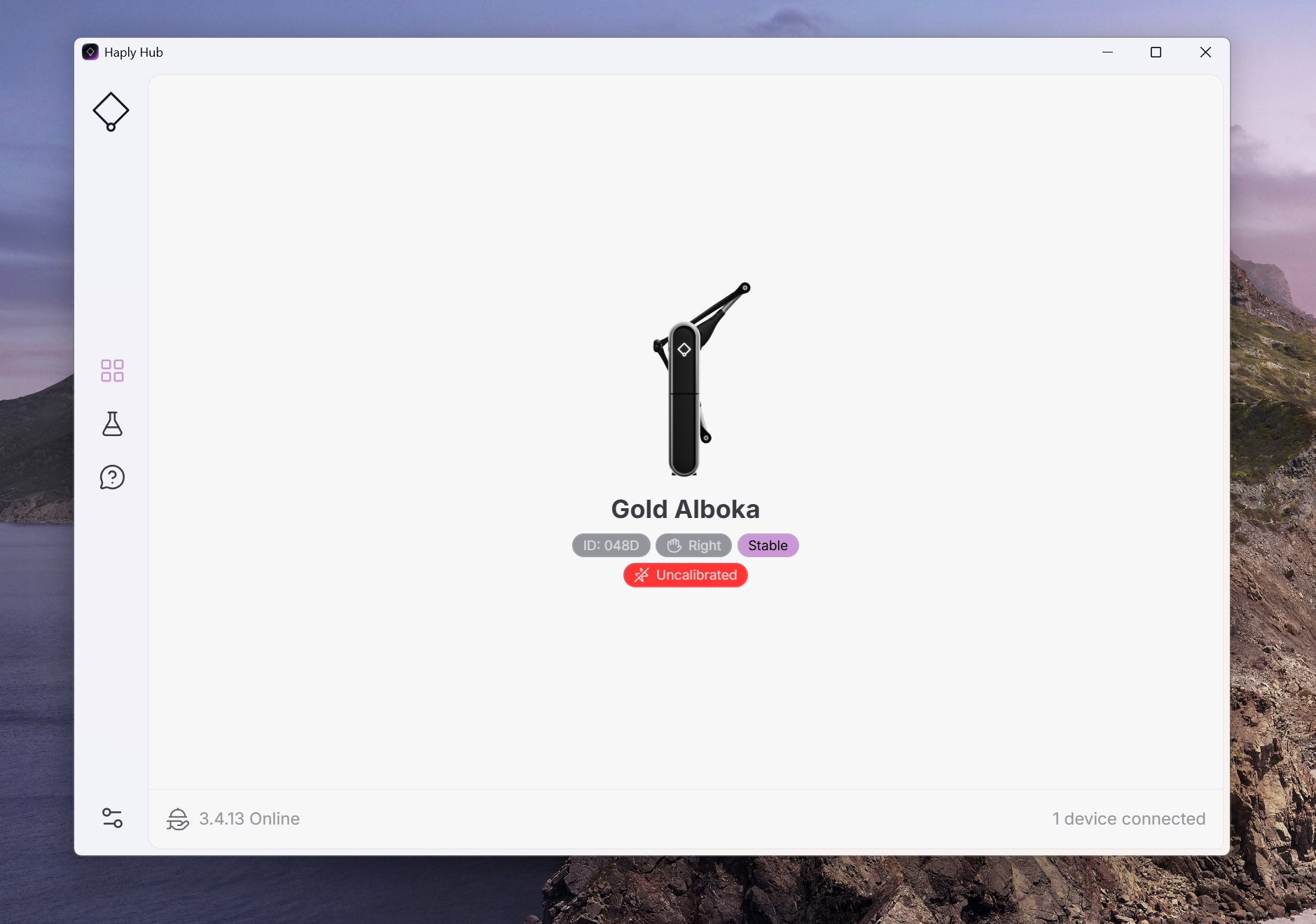
Während der Haply Hub läuft, sollten Sie sehen können, dass Ihre Geräte angezeigt werden, wenn Sie sie mit Ihrem Computer verbinden.
Schließen Sie das Inverse3 über das USB-Kabel an den Computer an und warten Sie, bis das Haply rot aufleuchtet und dann sofort lila wird. Wenn die Statusanzeige weiterhin rot leuchtet, vergewissern Sie sich, dass das USB-Kabel fest angeschlossen ist, oder verwenden Sie ein neues USB-Kabel.
Hinweis: Eine ausführliche Erläuterung der Statusleuchten finden Sie in unserer Farbcodetabelle unter Entwickeln mit Inverse3.

Stecken Sie das Netzteil in eine nahegelegene Steckdose und stecken Sie die Buchse des Netzteils in die 24-V-Steckdose des Geräts.
Wir empfehlen dringend, das Inverse3 über das mitgelieferte USB-Kabel direkt an Ihren Computer anzuschließen.
Vermeiden Sie die Verwendung eines Dongles oder einer zwischengeschalteten Verbindung, da dies die Kommunikation verlangsamen kann. Eine schnellere Kommunikation sorgt für eine reibungslosere Haptik. Sollten Probleme auftreten, überprüfen Sie bitte die USB-Verbindung. Die Verwendung anderer USB-Kabel kann zu Qualitäts- und Leistungseinbußen führen.
Kalibrierung
Inverse3 muss vor der Verwendung kalibriert werden, um die Genauigkeit von Position und Kraft zu gewährleisten. Zum Kalibrieren berühren Sie einfach den hervorstehenden Magneten am Gimbal mit dem Kalibrierungspunkt. Wenn die Kalibrierung abgeschlossen ist, wird die Statusanzeige weiß und zeigt an, dass Sie jetzt eine Simulation starten können.

Einrichten von zwei Inverse3 in bimanueller Konfiguration
Die Inverse3 können in jedem Winkel verwendet werden, auch auf dem Kopf stehend. Die VerseGrip-Klemme gibt Ihnen die Flexibilität, verschiedene Winkel auszuprobieren, um herauszufinden, was am besten zu Ihren spezifischen Bedürfnissen passt.
Für eine einfache bimanuelle Einrichtung empfiehlt Haply , dass Sie die Symbole des Geräts zu sich hinwenden, um die größtmögliche Winkelfreiheit des Stiftes zu erhalten, ohne dass Ihre Hand oder Finger mit den Armen oder dem Gimbal kollidieren.
Anschließen eines drahtlosen VerseGrip oder Zubehörs
Das Inverse3 verwendet einen Schnellverbindungsmechanismus zum Verbinden von VerseGrips. Um die Verbindung herzustellen, halten Sie die Arme des Geräts und das Werkzeug fest in getrennten Händen und drücken Sie die kugelförmige Spitze des Werkzeugs in die Klammer am Ende der Arme, bis der Mechanismus einrastet.
Zum Trennen des Werkzeugs kippen Sie das Werkzeug in Richtung der Arme des Geräts, bis der Verschluss aufspringt und das Werkzeug freigibt.
Haptische Demos
Laden Sie nun das Demopaket herunter und entpacken Sie die Dateien. Der entpackte Ordner enthält eine Reihe von Demos, die mit Chai3D erstellt wurden und es Ihnen ermöglichen, die Inverse3 Kraftrückkopplung und Leistung zu erleben. Die erste Demo simuliert eine Gelmembran, die wie unten gezeigt berührt, begrenzt und durchstochen werden kann. Probieren Sie die anderen Demos im Ordner aus, um die Fähigkeiten von Inverse3zu entdecken.
Die Demos sind mit der Dienstversion 3.1.0 und höher kompatibel. Wenn der Dienst nicht läuft, verbinden sich die Demos automatisch mit dem Dienst über die HardwareAPI.
Die Demos funktionieren nicht, wenn eine niedrigere Dienstversion als 3.1.0 erkannt wird. Bitte stellen Sie sicher, dass der Dienst aktualisiert wird, um Kompatibilitätsprobleme zu vermeiden.
