Erste Schritte mit HARP
(fortschrittliche Roboterplattform für den Einsatz am Menschen)
Dieser Artikel enthält Anleitungen zur grundlegenden Bedienung und Einrichtung von HARP. Am Ende werden Sie in der Lage sein, einen an Ihr System angeschlossenen Roboter fernzusteuern.
Bevor wir anfangen
Falls Sie Ihren Inverse 3 Ihren VerseGrip-Stift noch nicht eingerichtet haben, lesen Sie bitte die Anleitungen „Erste Schritte mit dem Inverse3 “ und „Erste Schritte mit dem VerseGrip-Stift “.
Installation von HARP
Führen Sie nach dem Herunterladen von HARP das Installationsprogramm aus. Der Vorgang ist unkompliziert, und die Anwendung wird nach Abschluss der Installation automatisch gestartet.
TODO – harp hinzufügen
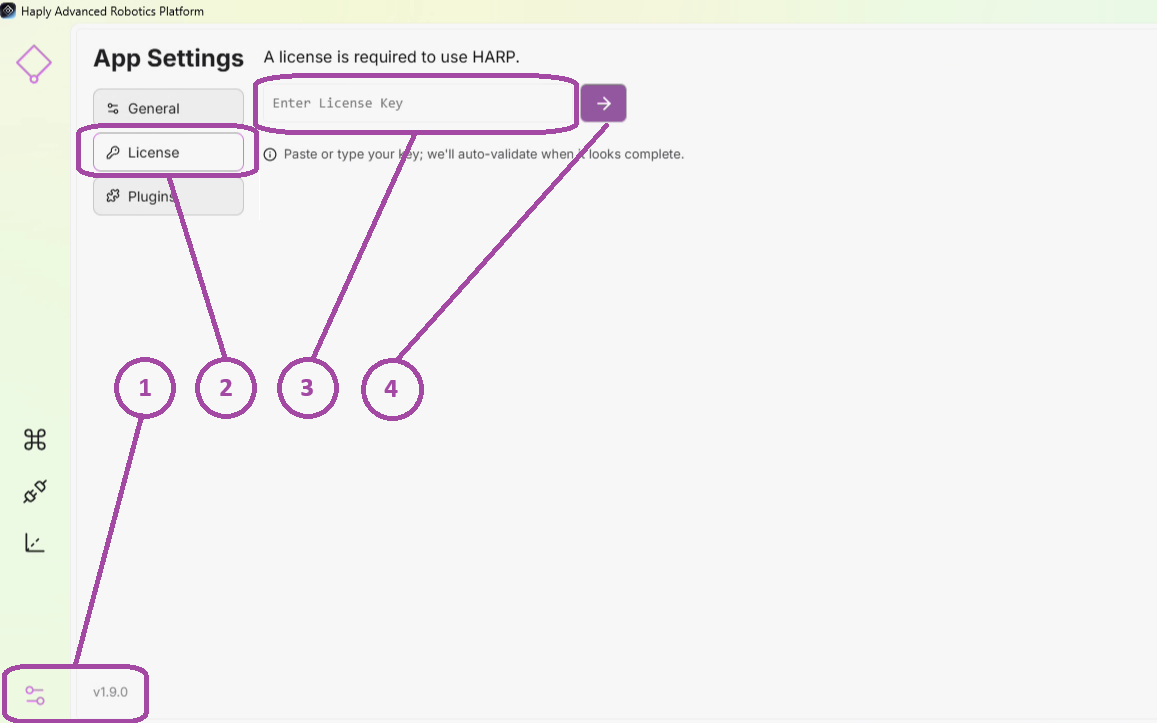
Lizenzüberprüfung
Wenn HARP , (1) gehen Sie zu den Einstellungen und (2) wählen Sie das Menü „Lizenz“ aus. (3) Geben Sie Ihren Lizenzschlüssel ein und (4) klicken Sie auf „Lizenz bestätigen“.
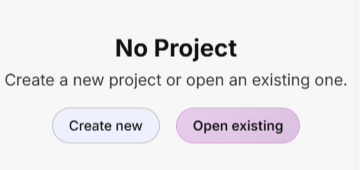
Ein Projekt erstellen
Erstellen Sie zunächst ein neues Projekt. Geben Sie dem Projekt einen Namen und wählen Sie das Verzeichnis aus, in dem das Projekt gespeichert werden soll.
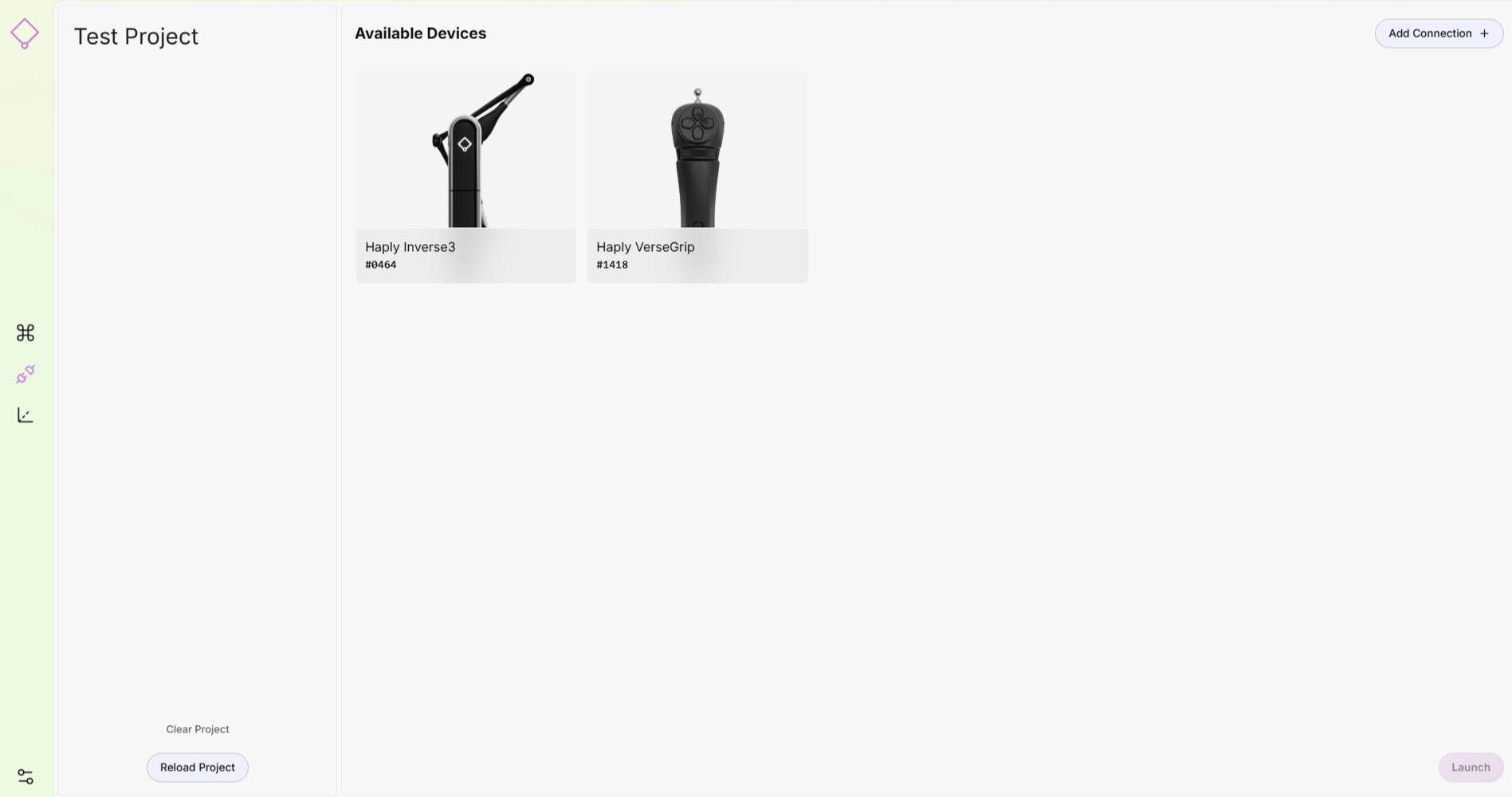
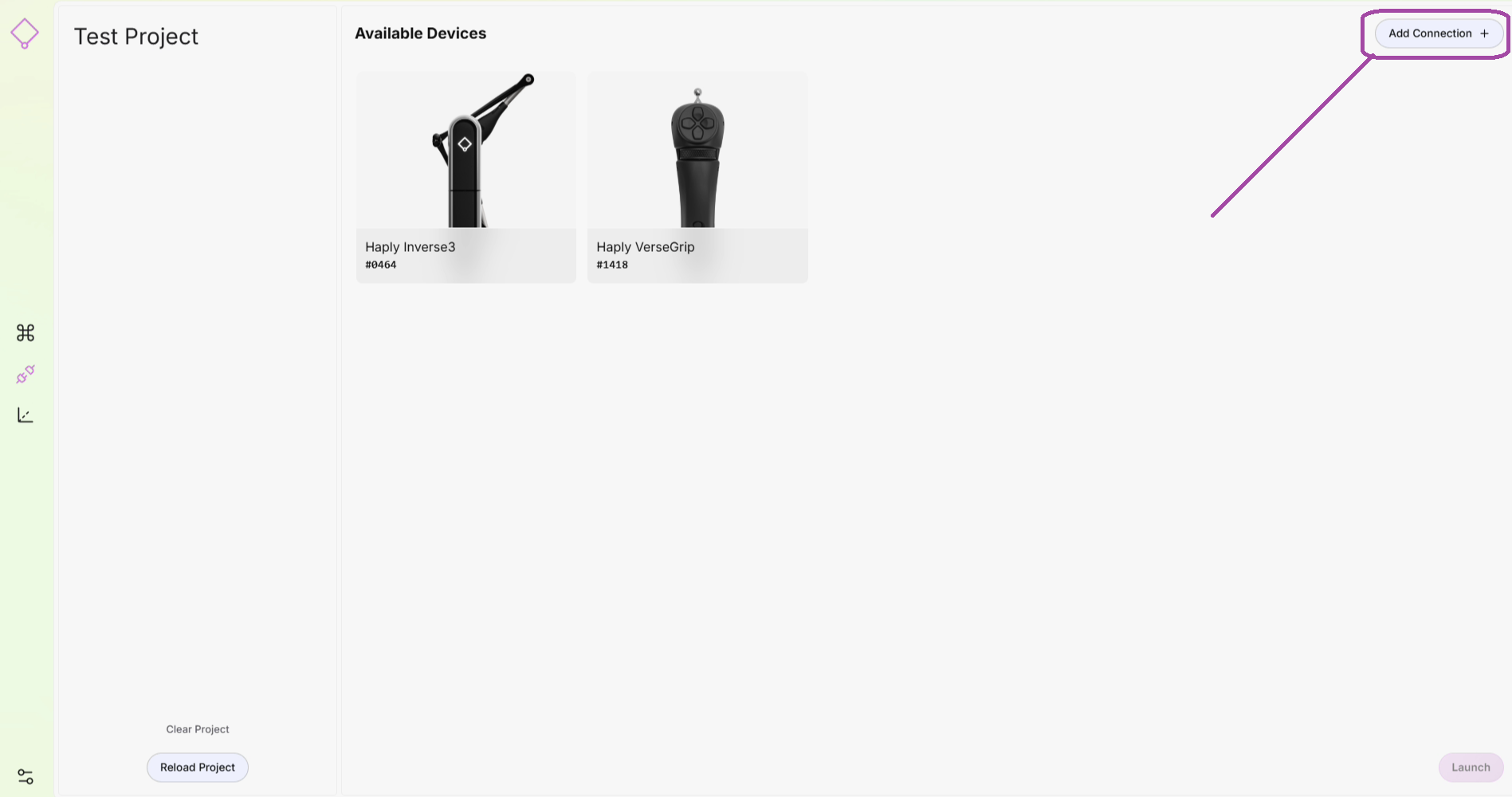
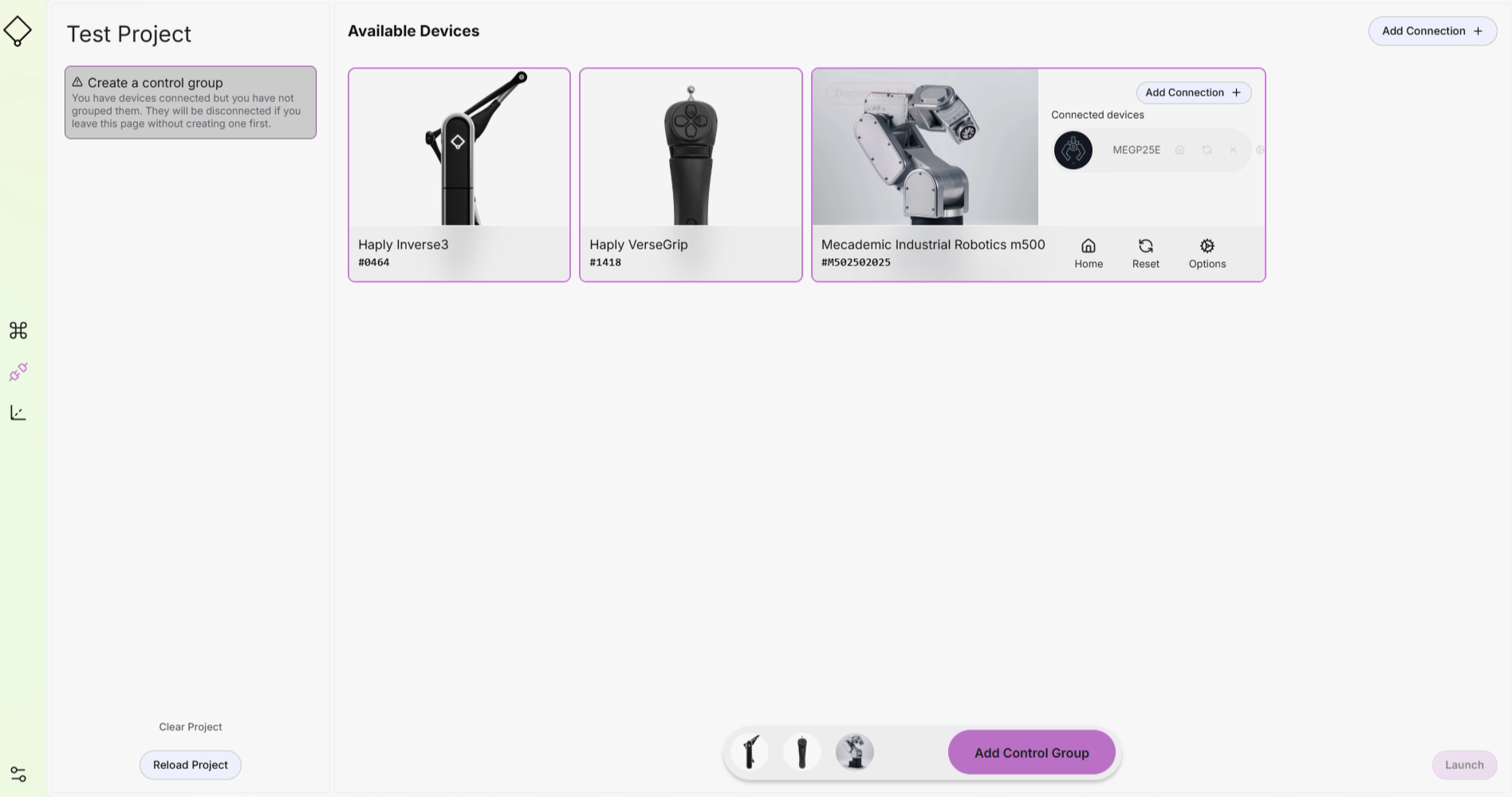
Verbundene Geräte
Leitgeräte
Stellen Sie sicher, dass die Leader-Geräte verbunden sind. Auf dem Bildschirm sollten Inverse 3 „VerseGrip“ angezeigt werden. Falls eines Ihrer Geräte nicht angezeigt wird, überprüfen Sie die Stromversorgung und stellen Sie sicher, dass der USB-Dongle für den VerseGrip an den PC angeschlossen ist.
Folgegeräte
Um unsere Folgegeräte anzuschließen, können wir über „Verbindung hinzufügen“ eine Verbindung zu Robotern, Kraft-/Drehmomentsensoren und Endeffektoren herstellen.
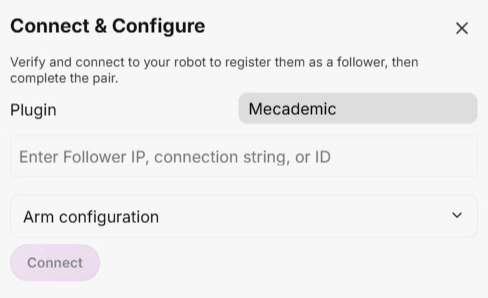
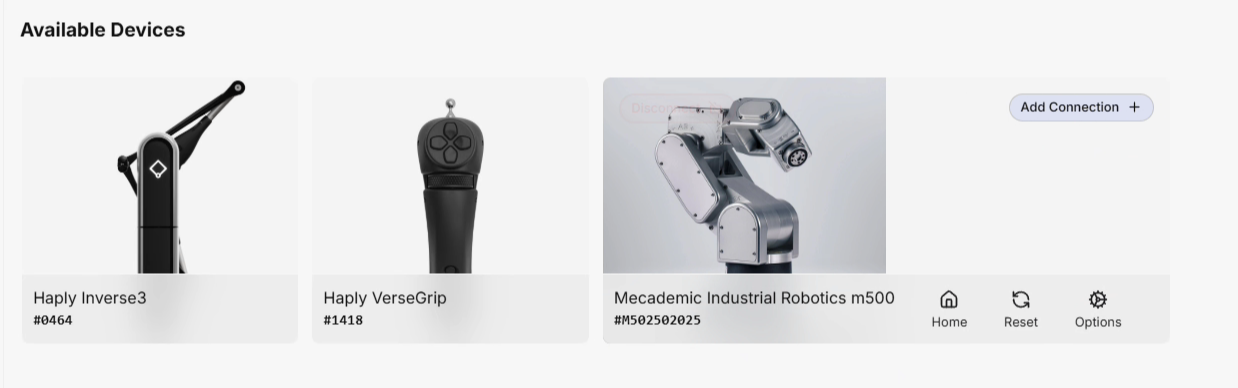
Wählen Sie zunächst den Roboterarm aus, wählen Sie den Roboter aus der Dropdown-Liste aus und geben Sie die Verbindungszeichenfolge ein. Klicken Sie auf „Verbinden“.
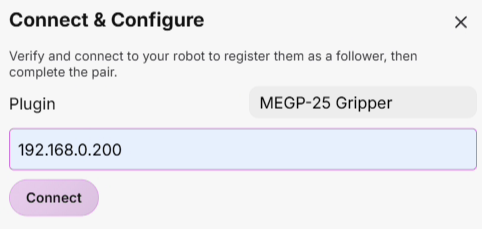
Fügen Sie einen Greifer hinzu und klicken Sie in der Kachel des verbundenen Roboters auf „Verbindung hinzufügen“.
Wählen Sie einen Endeffektor aus dem Dropdown-Menü aus und geben Sie die Verbindungszeichenfolge ein. Klicken Sie auf „Verbinden“.
Nachdem Ihre Geräte nun eingeschaltet und verbunden sind, erstellen wir eine Steuerungsgruppe. Klicken Sie auf jede der Geräte-Kacheln, die Sie in Ihre Steuerungsgruppe aufnehmen möchten. Sie werden unten angezeigt. Sobald Sie sie ausgewählt haben, klicken Sie auf die Schaltfläche „Steuerungsgruppe hinzufügen“.
Die Kontrollgruppe wird im Projektfenster auf der linken Seite angezeigt.
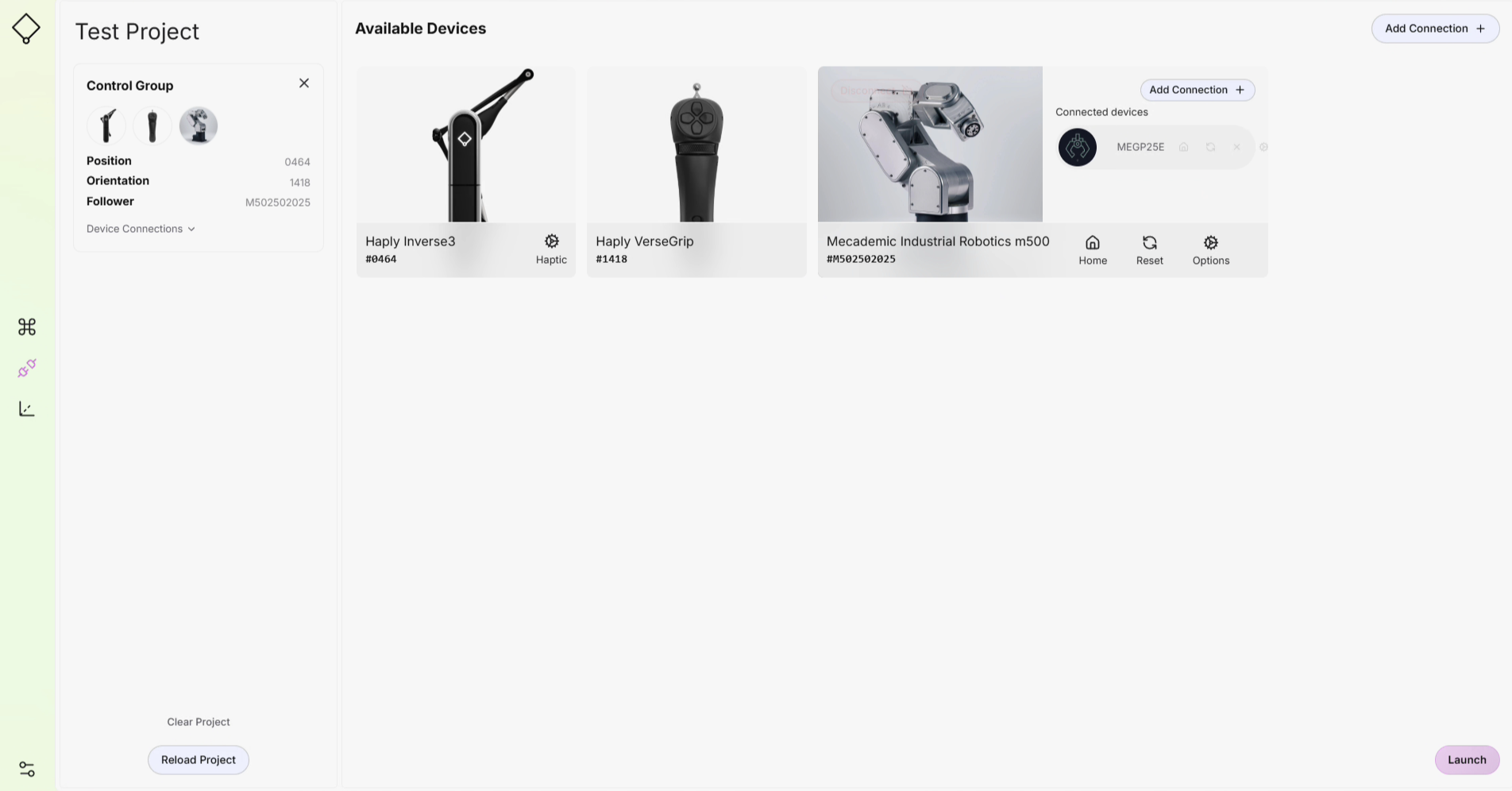
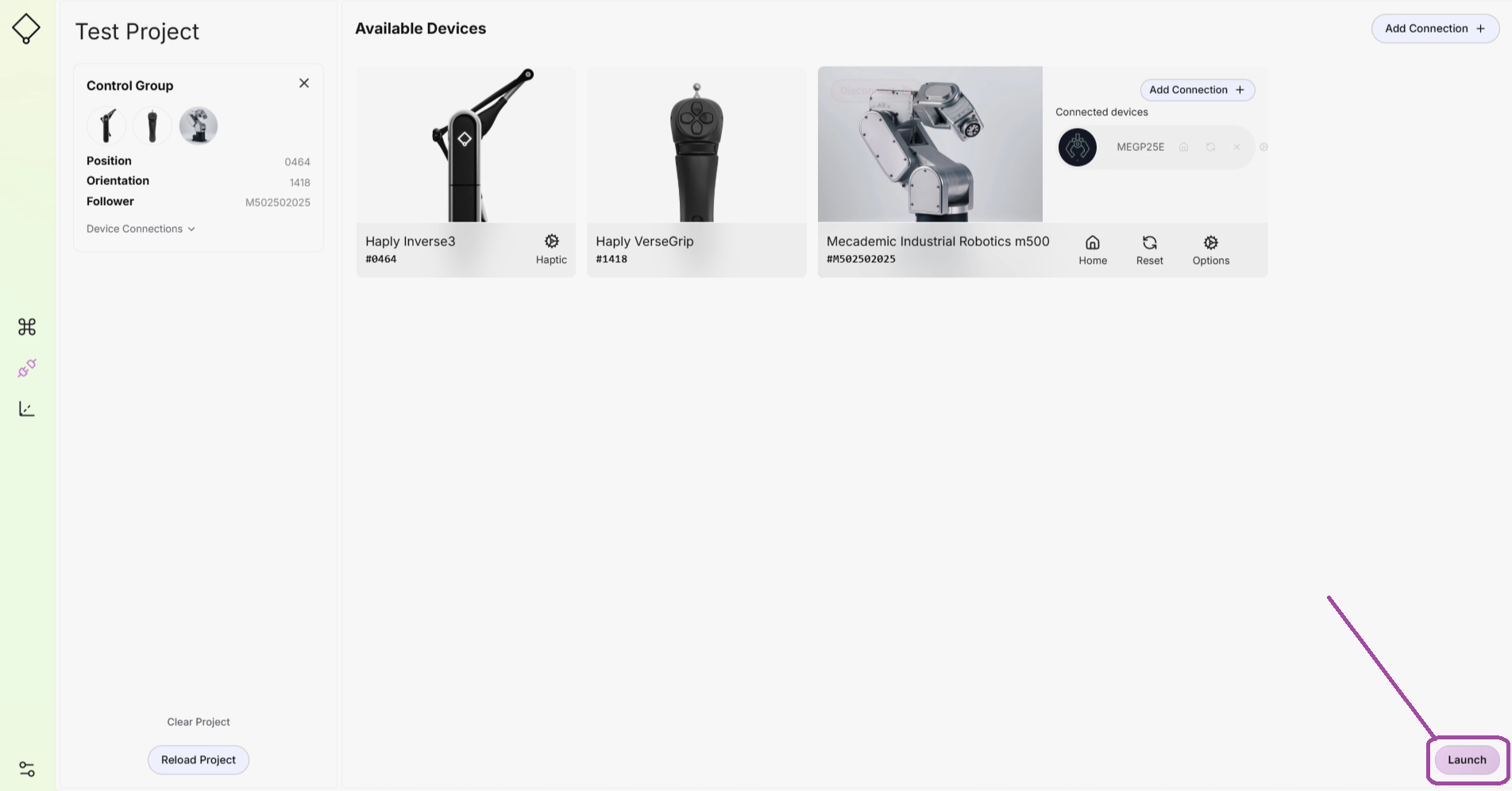
Sie haben alles erfolgreich angeschlossen. Drücken Sie die Start-Taste, um zum Steuerungsbildschirm zu gelangen, auf dem wir den Roboter steuern können.
Fernsteuerung
Im Moment hast du keine Einschränkungen, keine Grenzen. Sei vorsichtig, geh es langsam an und mach dich mit der Funktionsweise des Systems vertraut, bevor du dich an ernsthafte Steuerungsaufgaben wagst.
STOP-Taste (unten rechts): Hiermit kann der Benutzer den Roboter anhalten, bis die RESET-Taste gedrückt wird. (Auch die ESC-Taste stoppt den Roboter.)
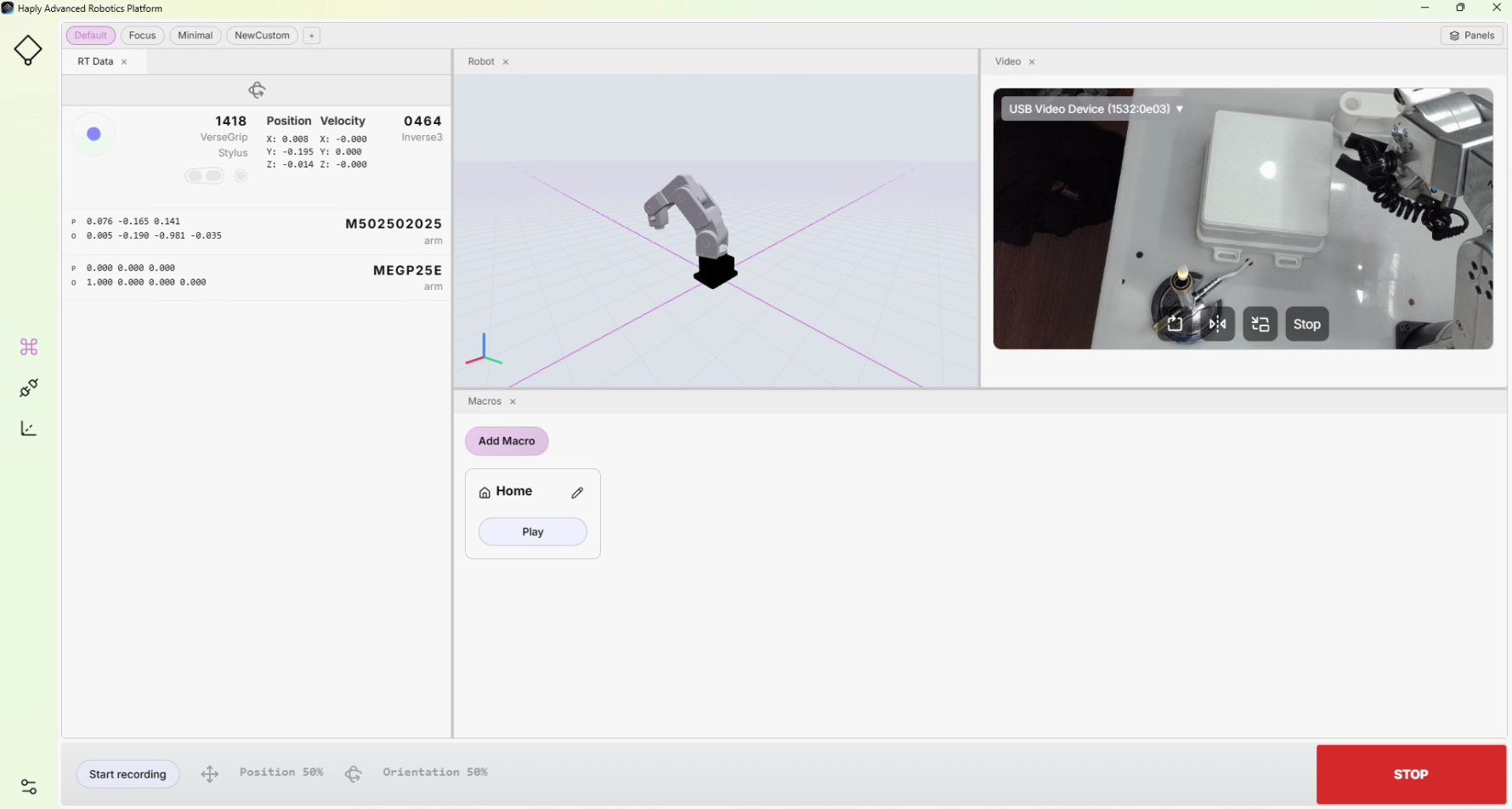
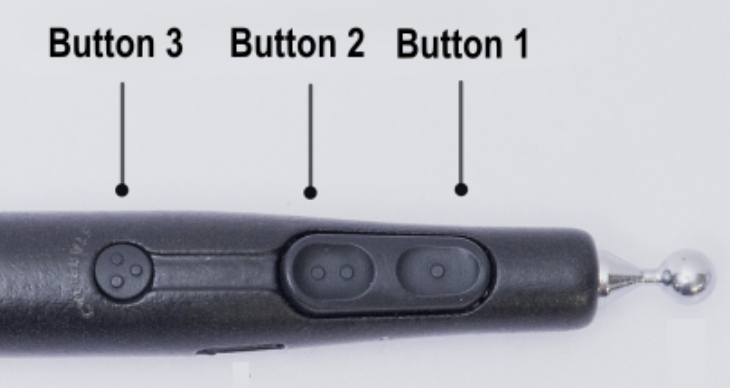
Beim VerseGrip dient Taste 1 als Kupplung.
- Kupplung NICHT betätigt – Sie können das Gerät frei bewegen, ohne dass sich der Roboter bewegt.
- Kupplung gedrückt – Der Roboter bewegt sich entsprechend Inverse 3 des Inverse 3 .